Scheduling Priority
Thread priority is the key factor considered by most scheduling policies when choosing the next thread to execute on a processor. Priority values define a numerical rank or ordering of the threads that a thread scheduler can use to resolve simultaneous contention for processing resources.
In a typical implementation, any threads in the runnable state are represented in an ordered list of queues with one list entry, or queue, per priority level. This is demonstrated in Figure 19.
Figure 19 – Queues and priorities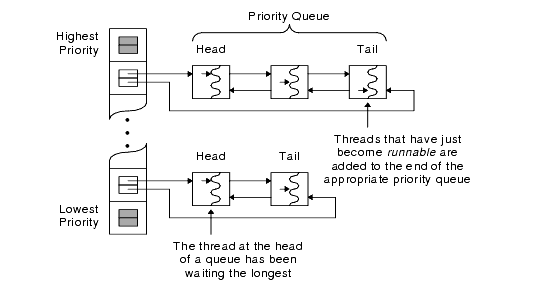
Range of priority values. In the Threading package, threads with numerically higher priority values receive scheduling preference over threads with lower priorities. The legal range for priority values tends to vary significantly between thread APIs, different contention scopes, and different scheduling policies.
Using the feature test macro. The feature test macro for scheduling priority is RW_THR_HAS_PRIORITY. If this macro is not defined, attempts to query or set a priority attribute always produce an exception. If it is defined, then the current environment has some level of support or recognition for scheduling priorities and might allow you to get or set a scheduling priority attribute.
The macro RW_THR_HAS_DUAL_PRIORITY indicates whether the current environment requires two separate priority values for threads with system contention scope:
RW_THR_HAS_DUAL_PRIORITY can be used to choose between use of the single priority attribute functions and the process-scope and system-scope priority functions. If this macro is defined, then:
Typedef for all priority values. The typedef RWPriority is the type for all priority values in the Threading package. The declaration of this typedef varies from one environment to the next, but is always based on one of the intrinsic integer types.
Member functions. The RWThreadAttribute member functions that manipulate the scheduling priority attribute value include:
Requirement for two priority values. Some platforms, such as Solaris, require the use of two separate priority values for threads with system contention scope;
Requirement for a separate process-scope priority. You should only need to define a separate process-scope priority for a system-scope thread when:
Support for two priorities. To support this dual priority scheme, the RWThreadAttribute class includes two sets of functions that are specialized versions of the normal priority function listed above. These functions should only be required when defining attributes for threads that have system contention scope.
Changing the inheritance or scheduling policy attributes. Changing the inheritance or scheduling policy attributes, either directly or as the result of a change in contention scope, can cause a previous priority setting to be discarded and can affect the range of allowable priority values, in accordance with the following table:
Inheritance Policy | Scheduling Policy | Priority |
|---|---|---|
Inherit | [Inherited] | [Inherited] |
Explicit | Preemptive(if available) | Policy-Dependent Range |
Fixed Time-Slicing(if available) | Policy-Dependent Range | |
Dynamic Time-Slicing(if available) | Policy-Dependent Range |
Availability of the process-scope priority attributes. The availability of the process-scope priority attributes might be affected by the current setting of the contention scope attribute, as shown in the next table.
Contention Scope | Requires Dual Priorities | Inheritance Policy | Scheduling Policy | Process-Scope Priority |
|---|---|---|---|---|
Process Scope(if available) | N/A | Inherit | [Inherited] | [Inherited] |
Explicit | Preemptive (if available) | Policy-Dependent Range | ||
Fixed Time-Slicing (if available) | Policy-Dependent Range | |||
Dynamic Time-Slicing (if available) | Policy-Dependent Range | |||
System Scope(if available) | No | N/A | N/A | Not Available |
Yes | Inherit | [Inherited] | [Inherited] | |
Explicit | N/A | System-Dependent Range |
Availability of the system-scope priority attributes. The availability of the system-scope priority attributes might be affected by the current setting of the contention scope attribute, as shown in the next table.
Contention Scope | Inheritance Policy | Scheduling Policy | System-Scope Priority |
|---|---|---|---|
Process Scope(if available) | N/A | N/A | Not Available |
System-Scope(if available) | Inherit | [Inherited] | [Inherited] |
Explicit | Preemptive (if available) | Policy-Dependent Range | |
Fixed Time-Slicing (if available) | Policy-Dependent Range | ||
Dynamic Time-Slicing (if available) | Policy-Dependent Range |
NOTE: The specific dependencies and validation requirements for the priority attributes are unique to each environment.
Inheriting a priority value. A priority value can be inherited from the creating thread if the inheritance policy attribute is defined as RW_THR_INHERIT. If the inheritance attribute is RW_THR_EXPLICIT, the Threading package chooses a default value appropriate for the current settings and environment. Setting a priority attribute value when the current inheritance policy is RW_THR_INHERIT forces the inheritance policy attribute to be changed to RW_THR_EXPLICIT.
Using a priority value. The priority specified by an RWThreadAttribute can only be used at thread creation. To manipulate the priority value of an active thread, use the following RWThread and RWThreadSelf functions:
Exceptions. In addition to throwing the same exceptions as their RWThreadAttribute counterparts, an RWTHRThreadNotActive exception is thrown should you attempt to query or set the priority on a threaded runnable that does not possess an active thread.




