SourcePro® 2023.1 |
SourcePro® API Reference Guide |
Handle class for a threaded runnable object. More...
#include <rw/thread/RWThread.h>
Static Public Member Functions | |
| static bool | canGetMaxThreads () |
| static bool | canSuspendResume () |
| static size_t | getMaxThreads () |
Protected Member Functions | |
| RWThread (RWThreadImp *threadImpP) | |
 Protected Member Functions inherited from RWRunnable Protected Member Functions inherited from RWRunnable | |
| RWRunnable (const RWRunnableSelf &second) | |
| Protected Member Functions inherited from RWRunnableHandle | |
| RWRunnableHandle () | |
| RWRunnableHandle (RWStaticCtor) | |
| RWRunnableHandle (RWRunnableImp *runnableImpP) | |
| RWRunnableHandle (const RWRunnableHandle &second) | |
| ~RWRunnableHandle () | |
| RWRunnableHandle & | operator= (const RWRunnableHandle &second) |
| Protected Member Functions inherited from RWHandleBase | |
| RWHandleBase (void) | |
| RWHandleBase (RWStaticCtor) | |
| RWHandleBase (RWBodyBase *body) | |
| RWHandleBase (const RWHandleBase &second) | |
| ~RWHandleBase (void) | |
| RWBodyBase & | body (void) const |
| RWHandleBase & | operator= (const RWHandleBase &second) |
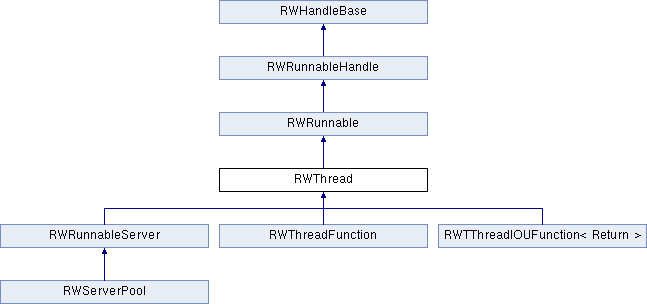
The RWThread class is a handle class for a threaded runnable object, providing an interface for threads that execute outside the threaded runnable.
A threaded runnable object provides the basic mechanisms used to create, control, and monitor the threads of execution within your application. Threaded runnables create their own thread to perform some task or activity.
Each threaded runnable object is reference-counted; a threaded runnable body instance keeps a count of the number of handles that currently reference it. A runnable object is deleted when the last handle that references the body is deleted.
A threaded runnable handle class instance may be empty. Any attempt to use an empty handle to access a threaded runnable produces an RWTHRInvalidPointer exception.
The public interface for a threaded runnable is provided by its handle classes. Many of the public functions in a handle simply forward control to a corresponding protected function in the body class.
The RWThread class provides an interface for threads executing outside of a threaded runnable, defining member functions that may be executed only by an external thread. The threads executing inside of a threaded runnable should access the runnable using the RWThreadSelf handle class. Functions available from either inside or outside of a threaded runnable are defined in both handle classes.
You may also convert an RWThreadSelf handle to an RWThread handle by calling the RWThreadSelf::getRWThread() member, but any attempt to violate the thread access restrictions imposed by the separate interfaces results in an RWTHRIllegalAccess exception.
|
inline |
|
inline |
Constructor that creates a global static RWThread handle object that may be assigned to before construction. This constructor does not change the static instance.
|
inline |
Copy constructor. Creates an RWThread object and binds it to the same threaded runnable, if any, pointed to by second.
|
inline |
Destructor.
|
protected |
Associates a new thread with self.
|
static |
Returns true if the getMaxThreads() function is supported in the current environment, otherwise false.
| bool RWThread::canGetPriority | ( | ) | const |
Returns true if the priority attribute is supported in the current environment and if the getPriority() function can return a legal value under the current circumstances. For example, returns true only if RW_THR_HAS_PRIORITY is defined and calling functions such as getPriority() and getMaxPriority() can return a legal value under the current circumstances.
Possible exceptions include RWTHRInvalidPointer and RWTHRInternalError.
| bool RWThread::canGetProcessScopePriority | ( | ) | const |
Returns true if the process-scope priority attribute is supported in the current environment and if the getProcessScopePriority() function can return a legal value under the current circumstances.
Possible exceptions include RWTHRInvalidPointer and RWTHRInternalError.
| bool RWThread::canGetSchedulingPolicy | ( | ) | const |
Returns true if the scheduling policy attribute is supported in the current environment and if the getSchedulingPolicy() function can return a legal value under the current circumstances.
Possible exceptions include RWTHRInvalidPointer and RWTHRInternalError.
| bool RWThread::canGetSystemScopePriority | ( | ) | const |
Returns true if the system-scope priority attribute is supported in the current environment and if the getSystemScopePriority() function can return a legal value under the current circumstances.
Possible exceptions include RWTHRInvalidPointer and RWTHRInternalError.
| bool RWThread::canGetTimeSliceQuantum | ( | ) | const |
Returns true if the time-slice quantum attribute is supported in the current environment and if the getTimeSliceQuantum() function can return a legal value under the current circumstances.
Possible exceptions include RWTHRInvalidPointer and RWTHRInternalError.
| bool RWThread::canSetPriority | ( | ) | const |
Returns true if the priority attribute is supported in the current environment and if the function setPriority() is callable under the current circumstances. For example, returns true only if RW_THR_HAS_PRIORITY is defined and calling setPriority() is supported under the current options. In addition, the function returns true only if both the calling thread and process have sufficient privileges to perform the requested operation.
Possible exceptions include RWTHRInvalidPointer and RWTHRInternalError.
| bool RWThread::canSetProcessScopePriority | ( | ) | const |
Returns true if the process-scope priority attribute is supported in the current environment and if the function setProcessScopePriority() is callable under the current circumstances. For example, returns true only if RW_THR_HAS_PROCESS_SCOPE_PRIORITY is defined and calling setProcessScopePriority() is supported under the current options. In addition, the function returns true only if both the calling thread and process have sufficient privileges to perform the requested operation.
Possible exceptions include RWTHRInvalidPointer and RWTHRInternalError.
| bool RWThread::canSetSchedulingPolicy | ( | RWSchedulingPolicy | policy | ) | const |
Returns true if the scheduling-policy attribute is supported in the current environment and if the function setSchedulingPolicy() is callable under the current circumstances. For example, returns true only if RW_THR_HAS_SCHEDULING_POLICY is defined and calling setSchedulingPolicy() is supported under the current options. In addition, the function returns true only if both the calling thread and process have sufficient privileges to perform the requested operation.
Possible exceptions include RWTHRInvalidPointer, RWTHRInternalError, and RWTHRBoundsError.
| bool RWThread::canSetSystemScopePriority | ( | ) | const |
Returns true if the system-scope priority attribute is supported in the current environment and if the function setSystemScopePriority() is callable under the current circumstances. For example, returns true only if RW_THR_HAS_SYSTEM_SCOPE_PRIORITY is defined and calling setSystemScopePriority() is supported under the current options. In addition, the function returns true only if both the calling thread and process have sufficient privileges to perform the requested operation.
Possible exceptions include RWTHRInvalidPointer and RWTHRInternalError.
| bool RWThread::canSetTimeSliceQuantum | ( | ) | const |
Returns true if the time-slice quantum attribute is supported in the current environment and if the function setTimeSliceQuantum() is callable under the current circumstances. For example, returns true only if RW_THR_HAS_TIME_SLICE_QUANTUM is defined and calling setTimeSliceQuantum() is supported under the current options. In addition, the function returns true only if both the calling thread and process have sufficient privileges to perform the requested operation.
Possible exceptions include RWTHRInvalidPointer and RWTHRInternalError.
|
static |
| RWThreadAttribute RWThread::getActiveAttribute | ( | ) | const |
Returns a handle to the thread attribute instance used to initialize the most recently created thread. If a thread has not yet been created, returns a copy of a default thread attribute instance.
Possible exceptions include RWTHRInvalidPointer and RWTHRInternalError.
| RWThreadAttribute RWThread::getAttribute | ( | ) | const |
Returns a handle to the thread attribute instance used to initialize any threads created by future calls to start(). Use getActiveAttribute() to get a copy of the attribute instance actually used to initialize the most recently started thread.
Possible exceptions include RWTHRInvalidPointer and RWTHRInternalError.
| RWPriority RWThread::getMaxPriority | ( | ) | const |
Returns the maximum priority value that may be specified for this thread. At runtime, use canGetPriority() to determine the availability of this feature. At compile time, check to see if RW_THR_HAS_PRIORITY is defined.
Possible exceptions include RWTHRInvalidPointer, RWTHROperationNotSupported, RWTHROperationNotAvailable, RWTHRThreadNotActive, and RWTHRInternalError.
| RWPriority RWThread::getMaxProcessScopePriority | ( | ) | const |
Returns the maximum process-scope priority value that may be specified for this thread. At runtime, use canGetProcessScopePriority() to determine the availability of this feature. At compile time, check to see if RW_THR_HAS_PROCESS_SCOPE_PRIORITY is defined.
Possible exceptions include RWTHRInvalidPointer, RWTHROperationNotSupported, RWTHROperationNotAvailable, RWTHRThreadNotActive, and RWTHRInternalError.
| RWPriority RWThread::getMaxSystemScopePriority | ( | ) | const |
Returns the maximum system-scope priority value that may be specified for this thread. At runtime, use canGetSystemScopePriority() to determine the availability of this feature. At compile time, check to see if RW_THR_HAS_SYSTEM_SCOPE_PRIORITY is defined.
Possible exceptions include RWTHRInvalidPointer, RWTHROperationNotSupported, RWTHROperationNotAvailable, RWTHRThreadNotActive, and RWTHRInternalError.
|
static |
Returns the maximum number of threads that may be created in this environment. This function is not supported in all environments. At runtime, use canGetMaxThreads() to determine whether this feature is available. At compile time, check to see if RW_THR_HAS_MAX_THREADS is defined.
Possible exceptions include RWTHROperationNotSupported.
| unsigned long RWThread::getMaxTimeSliceQuantum | ( | ) | const |
Returns the maximum time-slice quantum value that may be specified for this thread. At runtime, use canGetTimeSliceQuantum() to determine the availability of this feature. At compile time, check to see if RW_THR_HAS_TIME_SLICE_QUANTUM is defined.
Possible exceptions include RWTHRInvalidPointer, RWTHROperationNotSupported, RWTHROperationNotAvailable, RWTHRThreadNotActive, and RWTHRInternalError.
| RWPriority RWThread::getMinPriority | ( | ) | const |
Returns the minimum priority value that may be specified for this thread. At runtime, use canGetPriority() to determine the availability of this feature. At compile time, check to see if RW_THR_HAS_PRIORITY is defined.
Possible exceptions include RWTHRInvalidPointer, RWTHROperationNotSupported, RWTHROperationNotAvailable, RWTHRThreadNotActive, and RWTHRInternalError.
| RWPriority RWThread::getMinProcessScopePriority | ( | ) | const |
Returns the minimum process-scope priority value that may be specified for this thread. At runtime, use canGetProcessScopePriority() to determine the availability of this feature. At compile time, check to see if RW_THR_HAS_PROCESS_SCOPE_PRIORITY is defined.
Possible exceptions include RWTHRInvalidPointer, RWTHROperationNotSupported, RWTHROperationNotAvailable, RWTHRThreadNotActive, and RWTHRInternalError.
| RWPriority RWThread::getMinSystemScopePriority | ( | ) | const |
Returns the minimum system-scope priority value that may be specified for this thread. At runtime, use canGetSystemScopePriority() to determine the availability of this feature. At compile time, check to see if RW_THR_HAS_SYSTEM_SCOPE_PRIORITY is defined.
Possible exceptions include RWTHRInvalidPointer, RWTHROperationNotSupported, RWTHROperationNotAvailable, RWTHRThreadNotActive, and RWTHRInternalError. and RWTHRInternalError.
| unsigned long RWThread::getMinTimeSliceQuantum | ( | ) | const |
Returns the minimum time-slice quantum value that may be specified for this thread. At runtime, use canGetTimeSliceQuantum() to determine the availability of this feature. At compile time, check to see if RW_THR_HAS_TIME_SLICE_QUANTUM is defined.
Possible exceptions include RWTHRInvalidPointer, RWTHROperationNotSupported, RWTHROperationNotAvailable, RWTHRThreadNotActive, and RWTHRInternalError.
| RWPriority RWThread::getPriority | ( | ) | const |
Returns the current priority for the active thread associated with self. At runtime, use canGetPriority() to determine the availability of this feature. At compile time, check to see if RW_THR_HAS_PRIORITY is defined.
Possible exceptions include RWTHRInvalidPointer, RWTHROperationNotSupported, RWTHRThreadNotActive, and RWTHRInternalError.
| RWPriority RWThread::getProcessScopePriority | ( | ) | const |
Returns the current process-scope priority for the active thread associated with self. At runtime, use canGetProcessScopePriority() to determine the availability of this feature. At compile time, check to see if RW_THR_HAS_PROCESS_SCOPE_PRIORITY is defined.
Possible exceptions include RWTHRInvalidPointer, RWTHROperationNotSupported, RWTHROperationNotAvailable, RWTHRThreadNotActive, and RWTHRInternalError.
| RWThreadSelf RWThread::getRWThreadSelf | ( | ) | const |
Returns an internal thread interface associated with the thread, if any, associated with self.
| RWSchedulingPolicy RWThread::getSchedulingPolicy | ( | ) | const |
Returns the current scheduling policy for the active thread associated with self. At runtime, use canGetSchedulingPolicy() to determine the availability of this feature. At compile time, check to see if RW_THR_HAS_SCHEDULING_POLICY is defined.
Possible exceptions include RWTHRInvalidPointer, RWTHROperationNotSupported, RWTHRThreadNotActive, and RWTHRInternalError.
| unsigned RWThread::getSuspendCount | ( | ) | const |
Returns the number of times this thread has been suspended without being released. A return value of zero indicates that the thread is not currently suspended.
Possible exceptions include RWTHRInvalidPointer, RWTHROperationNotSupported, and RWTHRInternalError.
| RWPriority RWThread::getSystemScopePriority | ( | ) | const |
Returns the current system-scope priority for the active thread associated with self. At runtime, use canGetSystemScopePriority() to determine the availability of this feature. At compile time, check to see if RW_THR_HAS_SYSTEM_SCOPE_PRIORITY is defined.
Possible exceptions include RWTHRInvalidPointer, RWTHROperationNotSupported, RWTHROperationNotAvailable, RWTHRThreadNotActive, and RWTHRInternalError.
| unsigned long RWThread::getTimeSliceQuantum | ( | ) | const |
Returns the current time-slice quantum value for the active thread associated with self. At runtime, use canGetTimeSliceQuantum() to determine the availability of this feature. At compile time, check to see if RW_THR_HAS_TIME_SLICE_QUANTUM is defined.
Possible exceptions include RWTHRInvalidPointer, RWTHROperationNotSupported, RWTHROperationNotAvailable, RWTHRThreadNotActive, and RWTHRInternalError.
Assignment operator. Binds the handle to the same threaded runnable, if any, pointed to by second.
| unsigned RWThread::resume | ( | ) |
Resumes this thread after it has been suspended. At runtime, use canSuspendResume() to determine the availability of this feature. At compile time, check to see if RW_THR_HAS_SUSPEND_RESUME is defined.
Possible exceptions include RWTHRInvalidPointer, RWTHROperationNotSupported, RWTHRIllegalAccess, RWTHRThreadNotActive, and RWTHRInternalError.
| void RWThread::setAttribute | ( | const RWThreadAttribute & | second | ) |
Replaces the thread attribute instance used to initialize any threads created by future calls to start(). Changing a thread's attribute instance after the thread has been started does not affect its current thread.
Possible exceptions include RWTHRInvalidPointer and RWTHRInternalError.
| void RWThread::setPriority | ( | RWPriority | priority | ) |
Changes the priority of thread associated with self. At runtime, use canSetPriority() to determine the availability of this feature. At compile time, check to see if RW_THR_HAS_PRIORITY is defined.
Possible exceptions include RWTHRInvalidPointer, RWTHROperationNotSupported, RWTHROperationNotAvailable, RWTHRThreadNotActive, RWTHRBoundsError, RWTHRResourceLimit, and RWTHRInternalError.
| void RWThread::setProcessScopePriority | ( | RWPriority | priority | ) |
Changes the process-scope priority of the thread associated with self. At runtime, use canSetProcessScopePriority() to determine the availability of this feature. At compile time, check to see if RW_THR_HAS_PROCESS_SCOPE_PRIORITY is defined.
Possible exceptions include RWTHRInvalidPointer, RWTHROperationNotSupported, RWTHROperationNotAvailable, RWTHRThreadNotActive, RWTHRBoundsError, RWTHRResourceLimit, and RWTHRInternalError.
| void RWThread::setSchedulingPolicy | ( | RWSchedulingPolicy | policy | ) |
Changes the scheduling policy of the thread associated with self. At runtime, use canSetSchedulingPolicy%(policy) to determine the availability of this feature. At compile time check to see if RW_THR_HAS_SCHEDULING_POLICY is defined.
Possible exceptions include RWTHRInvalidPointer, RWTHROperationNotSupported, RWTHROperationNotAvailable, RWTHRThreadNotActive, RWTHRBoundsError, RWTHRResourceLimit, and RWTHRInternalError.
| void RWThread::setSystemScopePriority | ( | RWPriority | priority | ) |
Changes the system-scope priority of the thread associated with self. At runtime, use canSetSystemScopePriority() to determine the availability of this feature. At compile time, check to see if RW_THR_HAS_SYSTEM_SCOPE_PRIORITY is defined.
Possible exceptions include RWTHRInvalidPointer, RWTHROperationNotSupported, RWTHROperationNotAvailable, RWTHRThreadNotActive, RWTHRBoundsError, RWTHRResourceLimit, and RWTHRInternalError.
| void RWThread::setTimeSliceQuantum | ( | unsigned long | milliseconds | ) |
Changes the time-slice quantum value of the thread associated with self. At runtime, use canSetTimeSliceQuantum() to determine the availability of this feature. At compile time, check to see if RW_THR_HAS_TIME_SLICE_QUANTUM is defined.
Possible exceptions include RWTHRInvalidPointer, RWTHROperationNotSupported, RWTHROperationNotAvailable, RWTHRThreadNotActive, RWTHRBoundsError, RWTHRResourceLimit, and RWTHRInternalError.
| unsigned RWThread::suspend | ( | ) |
Suspends the execution of the thread associated with self until a matching resume() operation is performed.
At runtime, use canSuspendResume() to determine the availability of this feature. At compile time, check to see if RW_THR_HAS_SUSPEND_RESUME is defined.
Possible exceptions include RWTHRInvalidPointer, RWTHROperationNotSupported, RWTHRThreadNotActive, and RWTHRInternalError.
| void RWThread::terminate | ( | ) |
Terminates execution of this thread.
Possible exceptions include RWTHRInvalidPointer, RWTHRIllegalAccess, RWTHRThreadNotActive, RWTHRThreadActive, and RWTHRInternalError.
|
Copyright © 2023 Rogue Wave Software, Inc., a Perforce company. All Rights Reserved. |

